-
數位應用類——優選
-
基於多感測器之車載板球平衡控制系統
-
作品說明
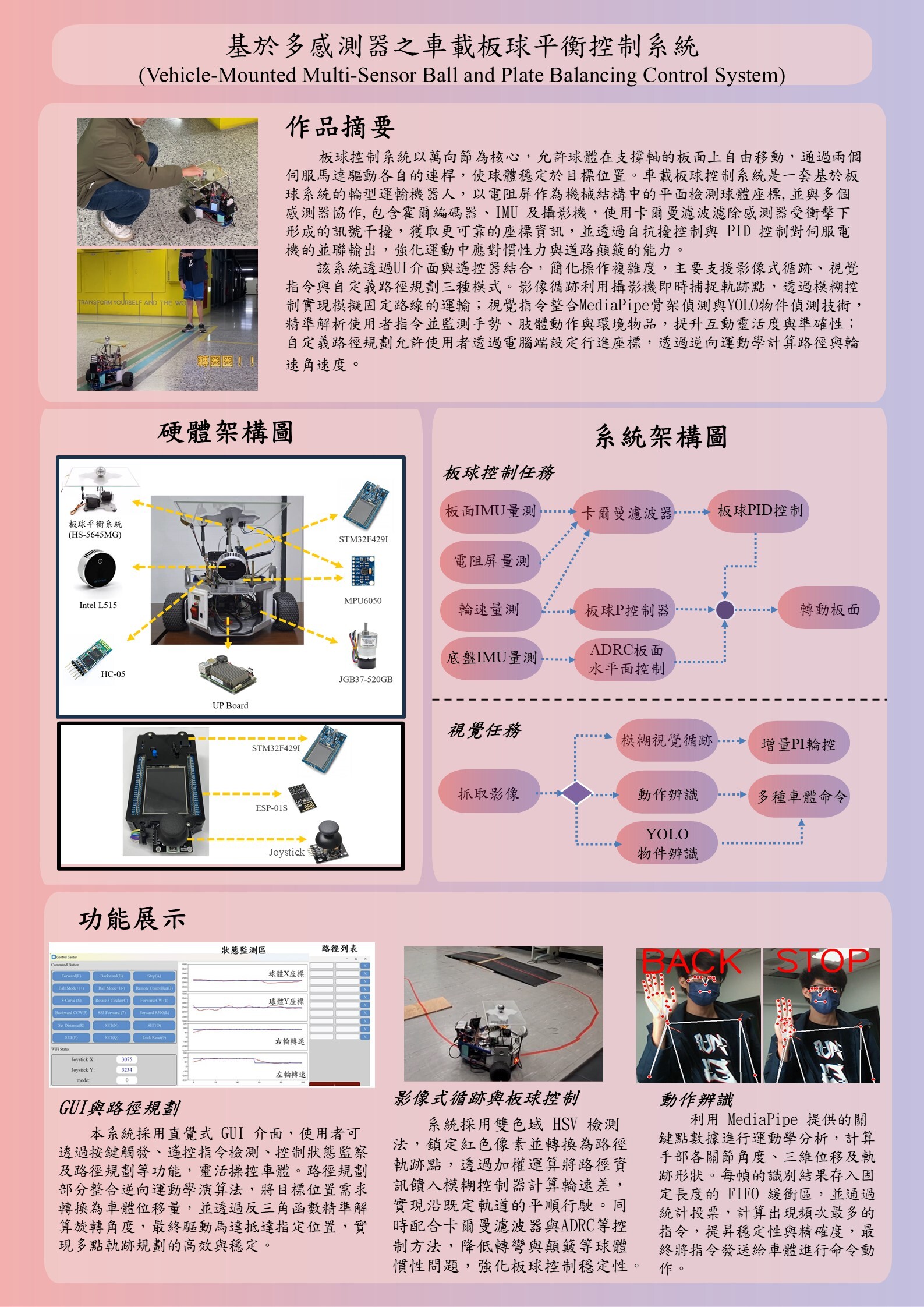
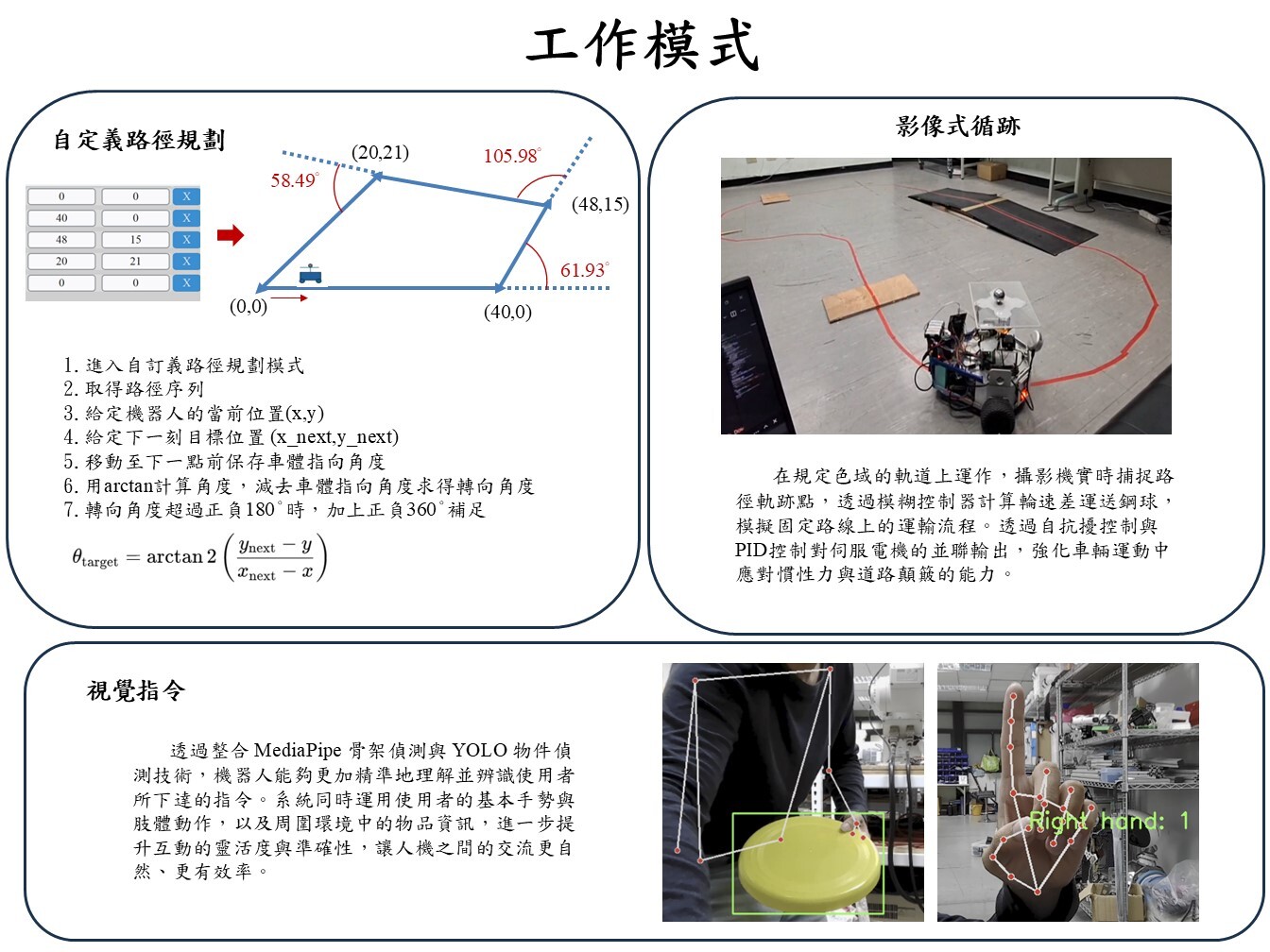
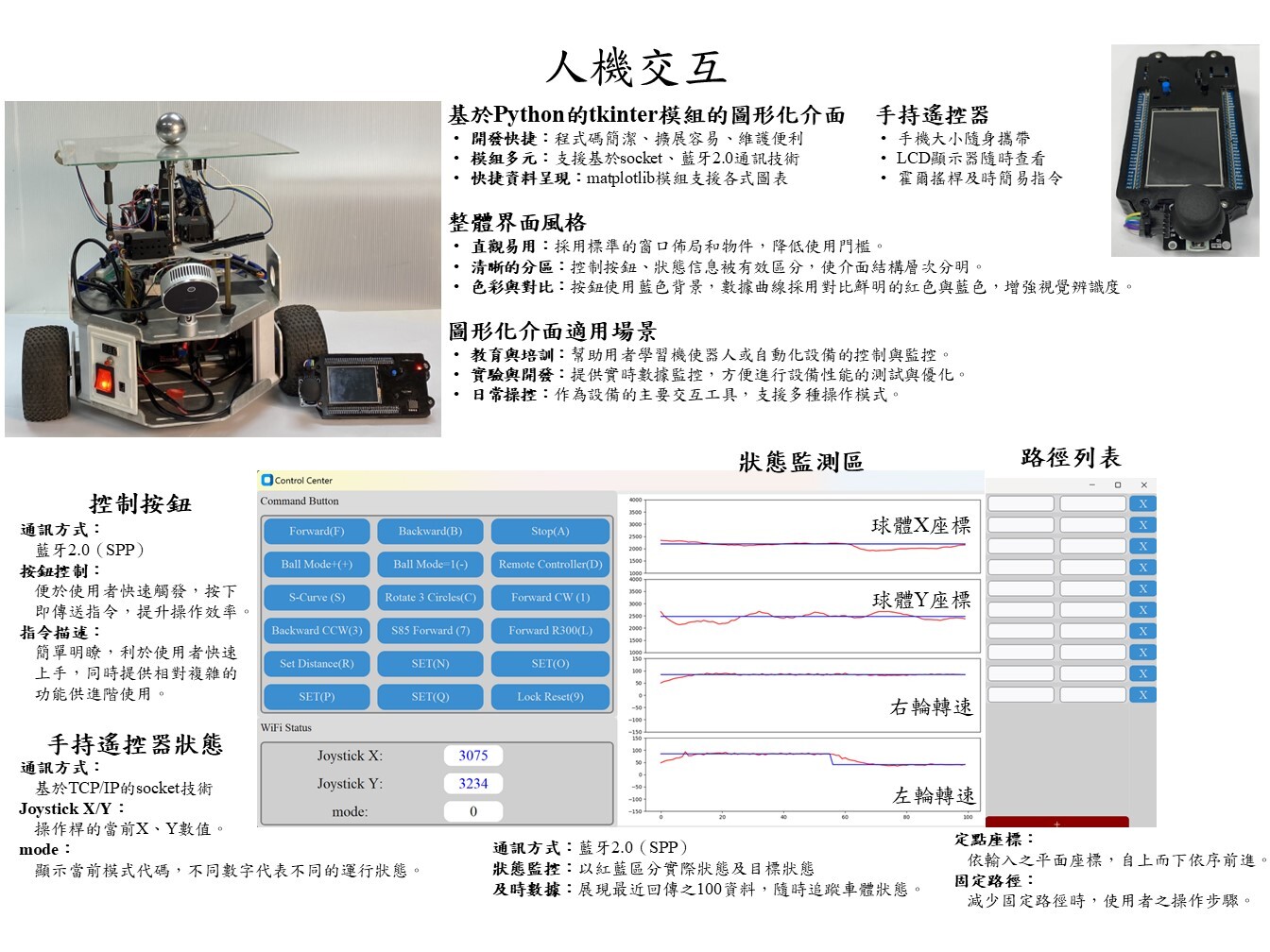
板球控制系統以萬向節為核心,允許球體在支撐軸的板面上自由移動,通過兩個伺服馬達驅動各自的連桿,使球體穩定於目標位置。車載板球控制系統是一套基於單點軌跡控制的球體運輸輪型機器人,以電阻屏作為機械結構中的平面檢測球體座標,並與多個感測器協作,包含霍爾編碼器、IMU及攝影機,使用卡爾曼濾波濾除感測器受衝擊下形成的訊號干擾,獲取更可靠的座標資訊,並透過自抗擾控制與PID控制對伺服電機的並聯輸出,強化運動中應對慣性力與道路顛簸的能力。 透過UI介面與遙控器結合,簡化操作複雜度,並主要支援以下三種模式 : (1)影像式循跡 : 在規定色域軌道上以攝影機實時捕捉路徑軌跡點,透過模糊控制器計算輪速差運送,模擬固定路線上的運輸流程。 (2)視覺指令 : 整合 MediaPipe骨架偵測與YOLO物件偵測技術,精準地理解使用者所下達的指令。同時監測使用者的手勢、肢體動作與周圍環境的物品資訊,提升互動靈活度與準確性,讓人機之間的交互更自然。 (3)自定義路徑規劃 : 可在電腦端自定義欲前往之座標點,透過路徑規劃計算各個座標點的資訊,包含相對距離、角度與停靠時機。 該作品以微控制器STM32F429I為控制運算單元,配合單板電腦決策,主要解決物流運輸上對貨物形狀的限制,擴展多元運輸方式。
-
隊伍名稱
低碳鋼物流運輸工程師
-
指導老師
吳志宏
-
學校名稱
國立高雄大學 電機工程學系
-
創作團隊
楊皓翔、吳偉民、冷堂愷、林鼎鈞